一、量子计算机为什么离不开“测控系统”?
我们已经知道,量子计算机的核心是量子比特。但一个关键的问题来了:量子比特究竟是怎么被操控的?
量子算法写在电脑里是代码,量子比特存在于超低温芯片或激光囚禁的原子中,中间必须有一个“翻译官”。
这个翻译官,就是量子测控系统。
它的作用可以用一句话概括:把“软件里的量子算法”翻译成“可以真实作用在量子比特上的物理信号”。
二、量子测控系统:量子世界与经典世界的桥梁
经过分层解耦后,量子计算机系统就像一个“分工明确的团队”,主要分为四大层级:
量子应用程序:用户编写算法,比如化学模拟、组合优化。
量子操作系统:负责任务调度、编译优化、错误缓解和纠错。
量子测控系统:接收指令,脉冲编译,时序规划,生成精确的控制信号。
量子计算硬件:量子芯片、激光系统、微波系统等。
测控系统承担“指令翻译、脉冲编译,时序规划、量子态测量、实时反馈”的核心职责。它决定了量子门执行精度、量子实验可靠性以及可扩展能力。

图:量子计算测控系统在整个系统中所处的位置
三、量子测控系统到底在做什么?
量子测控系统是量子世界与经典世界的桥梁,利用软硬一体的协同架构来实现量子任务到时序信号的转换和执行。它主要做两件事:操控量子比特和测量量子比特。操控量子比特是通过微波或激光信号完成量子门操作,测量量子比特是通过专用相机拍照识别或者信号采集分析来读取量子状态,并反馈结果。
完成这两方面的目标都是基于电子电路输出多通道同步时序信号控制光学和电子设备。目前流行的量子语言虽然可以简化量子算法的描述,但是很难通过编译输出机器码直接操控量子比特,因此需要通过量子测控系统对量子电路抽象为时序信号。
测控系统的主要流程是:量子操作系统接收用户的量子任务并编译生成原生门指令或脉冲指令,然后将指令数据传送到测控系统中,测控系统解析指令后进行脉冲时序的编译转换,并根据量子计算机类型进行时序规划和编排,最终通过底层通道输出数字和模拟信号,实现量子比特的操控和测量。
量子测控系统的核心功能模块:
指令解析模块:解析上层接口下发的测控指令;
脉冲处理模块:脉冲时序编译以及波形生成;
时序控制模块:纳秒级触发与同步管理;
数据采集模块:专用相机拍照识别或者ADC采样读出信号;
反馈控制模块:实现实时反馈闭环控制。
核心性能指标包括:解析速率、波形采样率、抖动指标、通道数、时延控制、同步精度等。
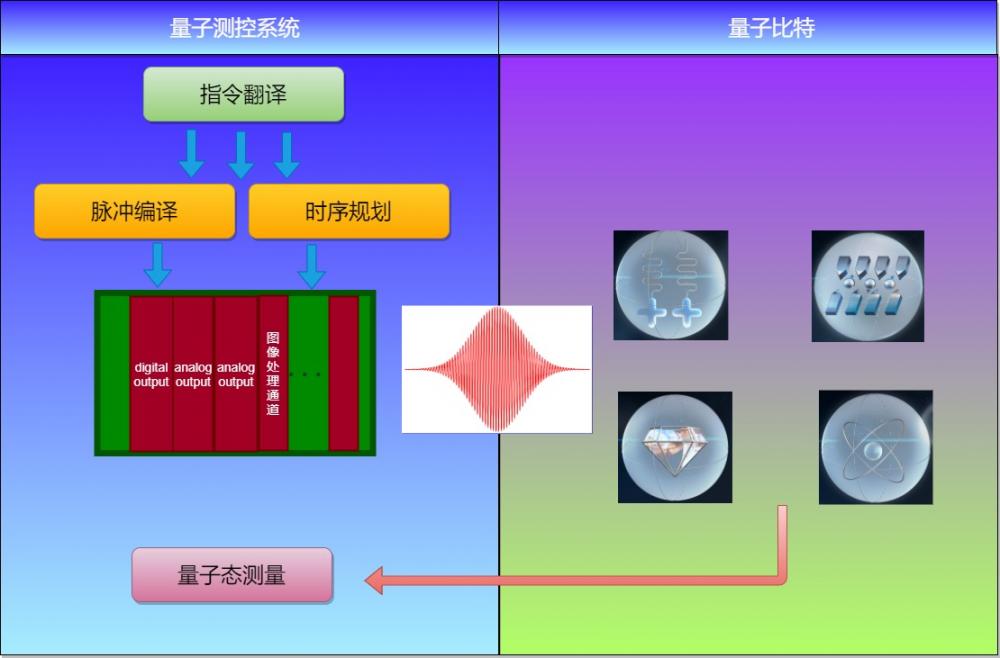
图:量子计算测控系统操控和测量量子比特示意图
四、测控的精髓
目前量子计算机领域有中性原子、超导等不同的路线,但是对于测控系统而言,相同的是上层面向用户的量子任务部署和底层时序控制电路,不同的是依据量子特性实现量子计算的手段和方法。
以中性原子测控系统为例,中性原子量子计算依赖激光,激光是中性原子量子计算最重要的工具,中性原子的冷却、囚禁、操控和测量都依赖激光。
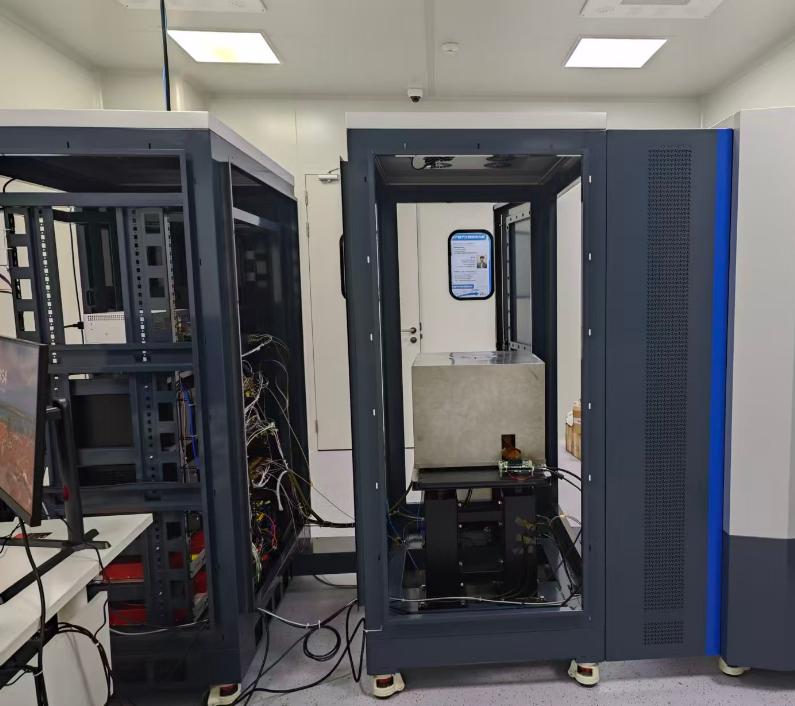
图: 国产中性原子量子计算机
中性原子的量子计算核心步骤包括:
磁光阱冷却、囚禁原子
光镊阵列(空间光调制器(SLM))装载原子
声光偏转器(AOD)移动原子
光泵过程制备基态
微波或者拉曼光操控单比特门,里德堡相互作用实现双比特门
共振光探测和荧光探测以及EMCCD相机成像读取状态
依此步骤,测控系统需要具备以下核心能力:
1、脉冲波形生成:驱动光的“内驱力”
如前文所说中性原子的量子计算需要激光控制原子,而驱动激光依靠声光调制器(AOM)和声光偏转器(AOD)等仪器,这些仪器则通过波形调制来驱动达到操控激光的目的。因此,脉冲波形的生成则是测控系统中的核心能力之一。
中性原子的脉冲波形主要是中低频信号,以及微波高频信号,可通过预存波形数据播放或者实时生成波形进行模拟信号输出。
2、时序设计:测控系统的“节拍器”
量子计算对同步要求极高。所有通道必须保证时钟信号同步,以达到所有通道纳秒级协同的目的。即可以同时并行输出多通道信号,每一通道信号都对应一路时序,这些时序分别控制光路开关、磁场强度、激光功率和频率、相机拍照等。不同时序控制不同的设备,这些设备执行操作的时刻必须确定,因此所有时序执行时间严格相关。例如增强某一路激光的频率,为了验证增强效果,需要对原子进行拍照操作,增强激光频率操作需要和拍照操作前后依次执行,且时延很小。
可以理解为:一支交响乐团必须严格按照指挥节拍演奏。任何一个通道慢半拍,都可能导致计算失败。
以下是测控系统中一组时序案例示意图:
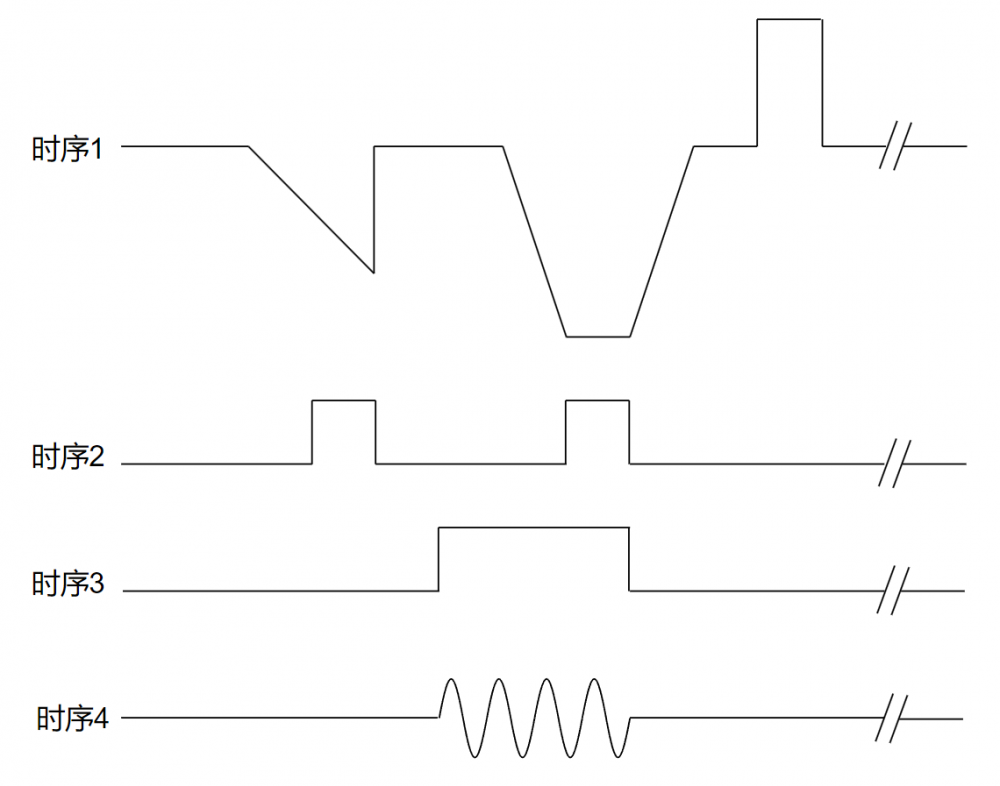
图:时序案例示意图
3、图像处理与反馈控制
中性原子系统中,物理比特量子态探测是通过CCD成像数据来实现的,因此需要进行图像的处理和读出反馈。通过相机获取原子荧光图像,实时定位原子位置,判断量子状态并反馈给控制系统。
图像处理有两种路线:
软件处理(有成熟的库调用但时延较高)
借助FPGA等实时处理器实时处理(难度高但速度快)
未来趋势是将关键反馈算法硬件化,实现真正实时量子反馈。
五、从实验室走向产业,测控系统未来的发展方向
随着量子比特数量不断提升、量子线路复杂度持续增加,测控系统将从“实验支撑平台”逐步演进为“规模化量子计算的核心基础设施”。未来发展将集中在三个关键方向:
1、更高集成度:从板卡系统走向芯片化架构
当前主流量子测控系统多采用板卡式架构:
任意波形发生器(AWG)控制板
高速DAC/ADC板
时钟与同步模块
混频与模拟前端模块
图像处理模块
这种架构虽然灵活,但在系统规模扩展时,会面临通道数量急剧增长、板卡堆叠复杂、时钟分发难度提升、功耗与散热压力加剧等难题,当量子比特规模从几十个迈向上百、上千个时,传统离散式架构的可扩展性将成为瓶颈,未来趋势是:向SoC化与专用控制芯片演进,将脉冲波形逻辑、信号生成模块、接口控制模块等进行高度集成,推动DAC/ADC与数字控制逻辑的近距离耦合,发展专用量子控制ASIC。在更长远的路径上,甚至可能出现:面向特定量子路线的“量子控制专用芯片(Quantum Control SoC)”。这不仅可以显著降低系统体积与功耗,还能减少信号链长度,从物理层面提升信号完整性与稳定性。集成化的本质,并不仅是“尺寸缩小”,而是架构重构、信号路径优化、系统级复杂度降低,这是测控系统工程化成熟的重要标志。
2、更低延迟:迈向纳秒级实时闭环控制
在当前系统中,典型的控制流程为:控制信号发送→量子测量→ADC采样(图像采集)→采集数据实时处理→反馈决策→DAC输出,这一闭环路径的总延迟,直接影响测控的实时误差抑制能力、校准效率和量子纠错执行效率。
随着量子纠错(QEC)需求增强,测控系统必须支持在极短时间内完成测量—判断—反馈动作。未来目标是实现:
纳秒级触发同步
极低抖动时钟分发
内部超低延迟流水线优化
板间高速互联低延迟通信
当量子系统进入“纠错主导阶段”后,控制系统的延迟能力将不再是辅助指标,而是核心性能参数之一。换句话说:未来量子计算的竞争,很可能部分取决于谁的控制链路更快。
3、更强智能化:引入AI实现自校准与自优化
目前量子测控系统中的大量工作仍依赖人工参与,例如:频率扫描、脉冲参数调优、误差模型构建等。这些过程的特点就是:
参数空间大
非线性特征明显
对经验依赖强
调试周期长
随着量子比特数量增加,人工调参模式将不可持续。未来方向是将机器学习与AI算法嵌入测控系统,典型应用包括:
自动频率扫描
智能脉冲整形优化
噪声模型在线学习
预测性校准与漂移补偿
多参数并行寻优
在架构层面,以SoC+GPU为原型系统,SoC负责实时执行,GPU负责训练模型,形成“AI辅助控制闭环”,更进一步的设想是:测控系统能够根据运行数据自动优化控制策略,实现长期自稳定运行。这将显著降低系统运维成本,并提高大规模量子设备的可管理性。
六、总结:测控系统是量子计算真正落地的关键支撑
量子算法决定上限,量子硬件决定基础,而量子测控系统决定:量子计算能否真正稳定、可靠、高效运行。它是连接软件与物理世界的桥梁,是量子计算走向规模化与产业化不可或缺的核心技术。小型化测控系统未来就是量子计算落地的支撑和幕后英雄。
作者:中国移动云能力中心未来科技研究院 量子计算操作系统团队



