近日,在中国电动汽车百人会组织的车路城融合论坛上,中国信息通信科技集团有限公司副总经理、总工程师,移动通信及车联网国家工程研究中心主任陈山枝博士围绕“巩固和扩大新能源汽车发展优势”议题,发表了“C-V2X车联网及车路云协同进展及建议”的主题演讲。

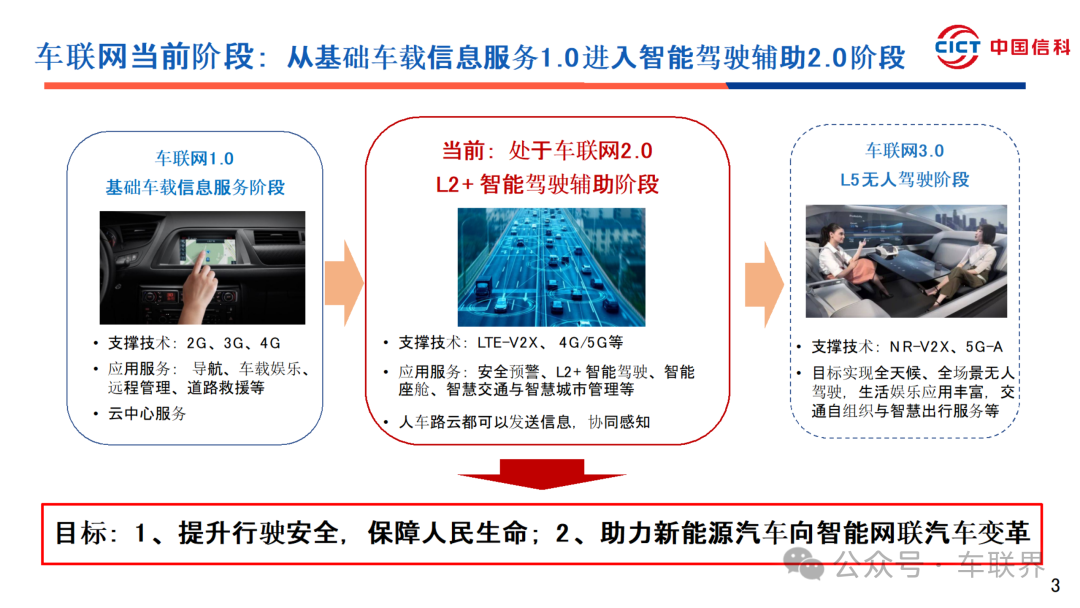
陈山枝博士表示随着新能源汽车向智能网联新能源汽车推进,车联网成为支撑智能网联汽车实现的必经之路。他提到,目前车联网发展正在进入快车道,正处于2.0阶段,主要目标是赋能提高智能驾驶水平,提升行驶安全、保障人民生命健康,提升交通效率。
对于目前业界存在的两点主要困惑,陈山枝一一在大会上进行了相关澄清,主要包括:1、智能网联汽车、车联网、车路云协同的关系;2、4G/5G、C-V2X车联网、卫星通信等多种通信技术间的关系。他还发表了对于促进智能网联汽车创新发展的重要观点指出:1.单车智能是基础和根本,C-V2X车联网是增强技术,二者是互补关系;2.当前车和路的协同感知基础上都是各自自主决策;3.车联网新型基础设施将促进车路城融合发展。
以下为演讲实录(略有删减):
首先跟大家报告一下,车联网是什么?首先车联网包括了:一是车内网,汽车内部通信网络,CAN或车载以太网等等。二是过去几年已经商用的车云网,即Telematics。三是正在推进的车际网(V2X)。

车联网1.0,即Telematics,主要是过去简单的基础车载信息服务。当前则处于车联网2.0阶段,即支持L2+智能驾驶辅助阶段,主要目标是提高行使安全、降低交通效率、保证人民健康。具体包括:安全预警、协同感知、智慧交通等等。未来是支持L5全天候、全场景的无人驾驶,我们认为是车联网3.0阶段。
当前,我国正在大力推进新能源汽车向智能网联新能源汽车过渡,是产业重大的变革,兼具社会效益与经济价值,我们希望快速推进车联网支撑智能网联新能源汽车产业发展,实现我国在全球引领。
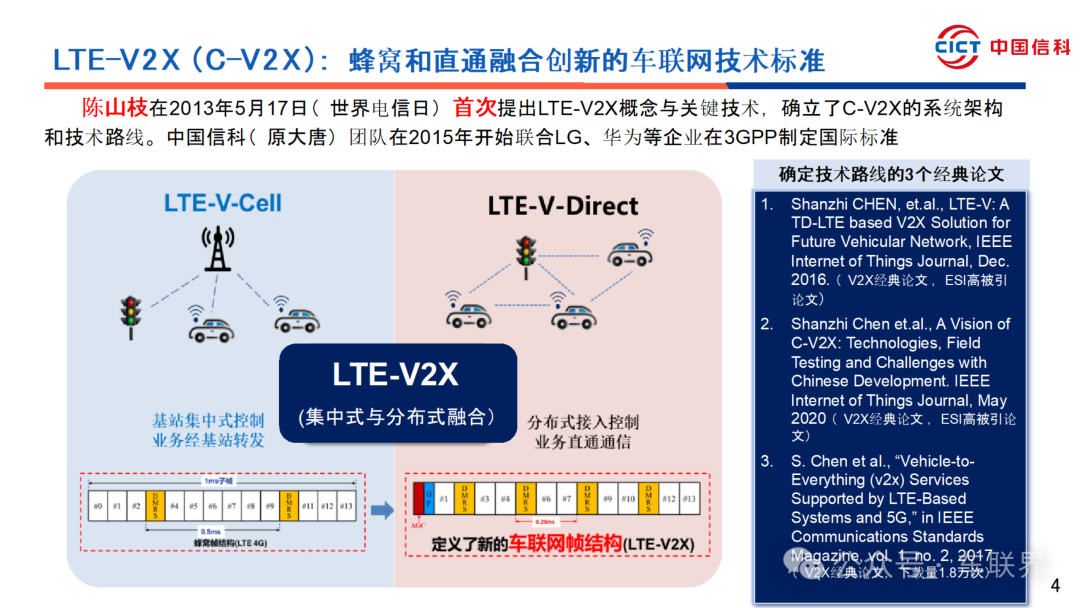
2013年5月17日,我本人首次在全球率先提出LTE-V2X概念与关键技术,确立了C-V2X的系统架构和技术路线。
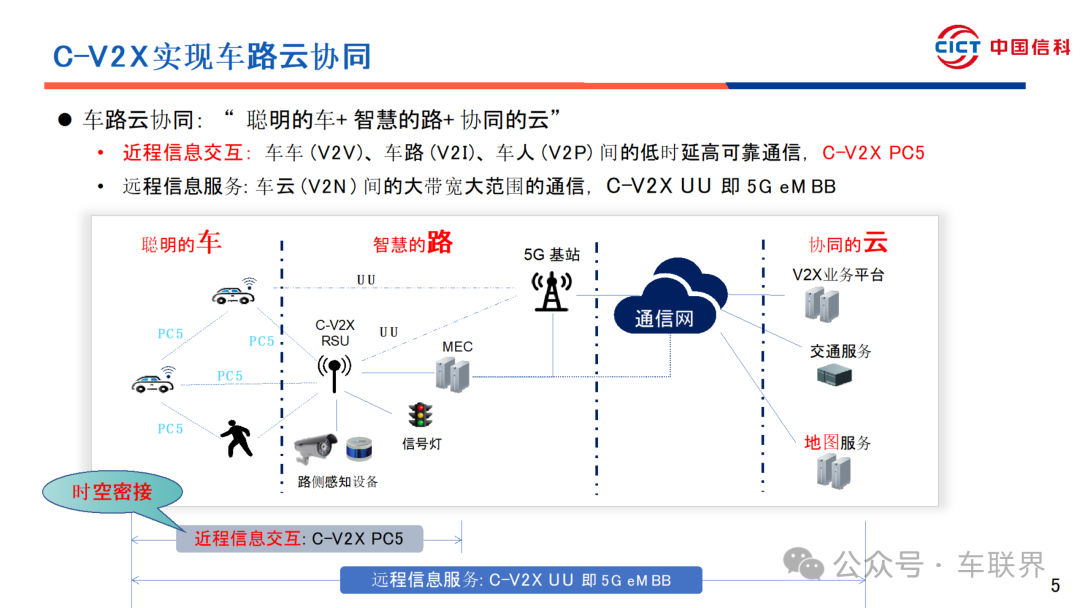
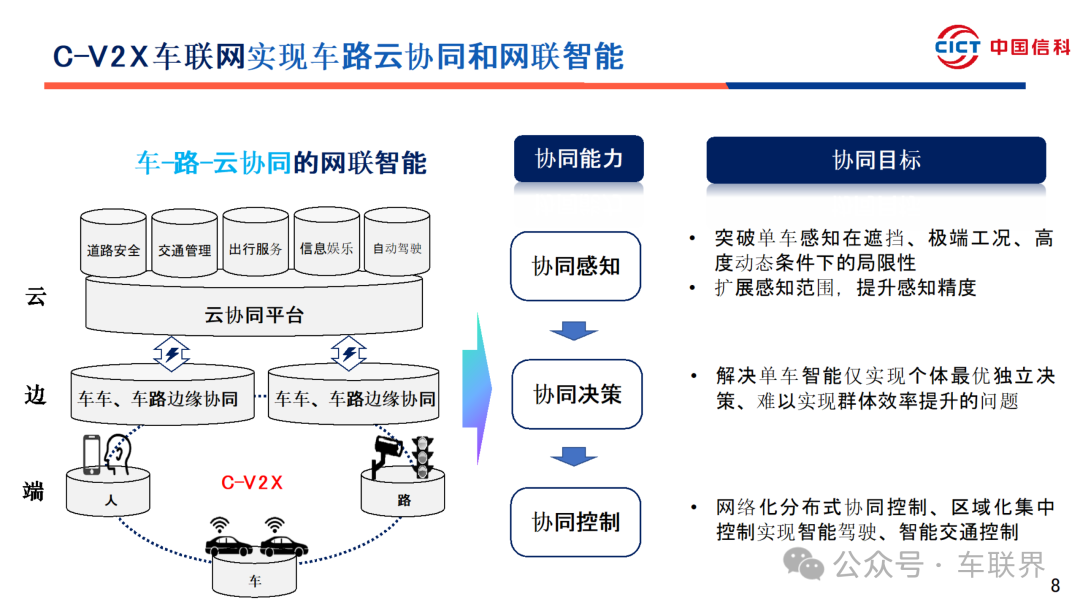
我们经常讲“聪明的车、智慧的路、协同的云”,即基于车联网的车路云协同。聪明的车,车要智能起来。智慧的路,路侧通过部署感知设备、信控信号数字化,变成智慧的路。协同的云,有交通管理、地图导航服务等。C-V2X车联网包括近程信息交互、远程信息服务。近程信息交互,实现车与车、车与路、车与弱势交通参与者等的通信,有低时延、高可靠的严苛要求,与智能驾驶紧相关。远程信息服务,指V2N,实现交通全局优化和娱乐信息服务,对实时性要求没有那么强,但要求通信覆盖性好,主要与智能座舱相关。
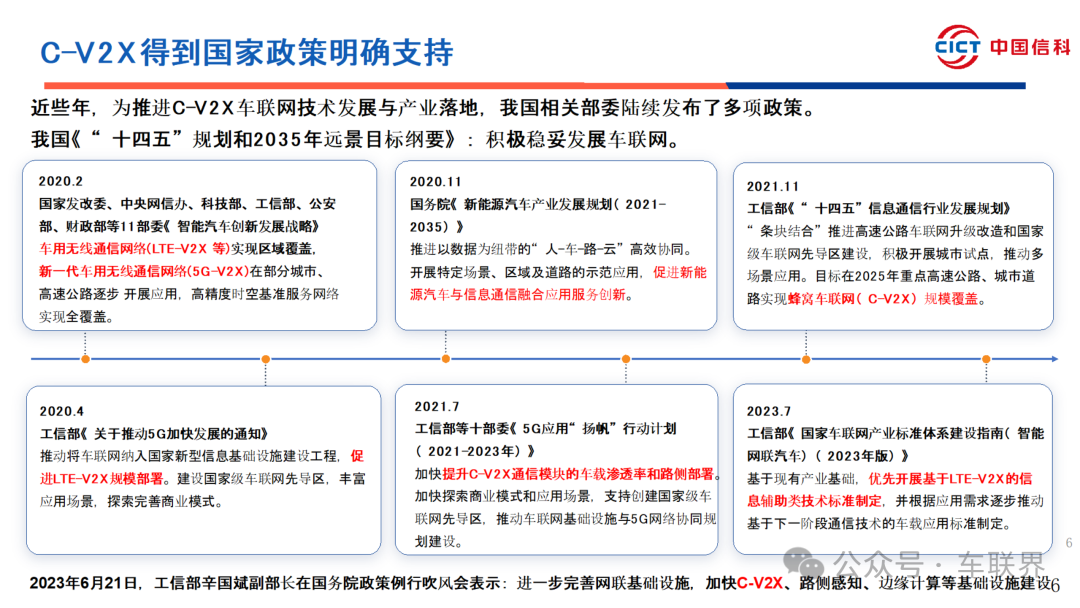
C-V2X车联网发展得到了国家政策的支持,特别是我国“十四五”规划明确提出:积极稳妥发展车联网。针对LTE-V2X/C-V2X发展,国家也出台了系列政策。
我国C-V2X车联网产业生态已成熟,逐渐形成了包括通信芯片、通信模组、车载终端(OBU)、路侧设备(RSU),测试仪表、整车制造、测试认证、高精度定位及地图、安全等的多厂家供货环境,包括在技术验证、互联互通方面,我们在全球也是走在前面的。

C-V2X车联网正在支撑车路云的智能网联汽车和智能交通方案落地,实现协同感知、协同决策、协同控制,当前还处在协同感知阶段,未来会走向协同控制阶段。
C-V2X比较典型的场景应用,比如鬼探头问题,可以通过网联智能解决,路侧摄像头将相关信息发给车辆,通过I2V避免交通事故。

另一个是高速连环撞车场景,视频是2022年台州发生严重的连环撞车事件,这无法靠单车智能解决,因为雷达和视频感知距离在200米左右,高速公路场景前车一旦出问题,时速100多公里时根本无法避免连环撞车。通过C-V2X车联网我们做了实车测试对比,前车和后车都装了网联式ADAS,即C-V2X和ADAS融合的域控制器,我们是基于广汽埃安改装的,当中间车切出的时候,前车发送给后车信息,后车就能及时刹车停住。也想说明一下,我们现在路侧的覆盖率、渗透率低确实是个问题,我也想告诉大家,不需要达到100%的渗透率,因为上述案例中,三辆车只需两辆车装的C-V2X功能就能实现。有论文实测分析,约1%网联车可降低14%的交通拥堵,交通效率就能改善。

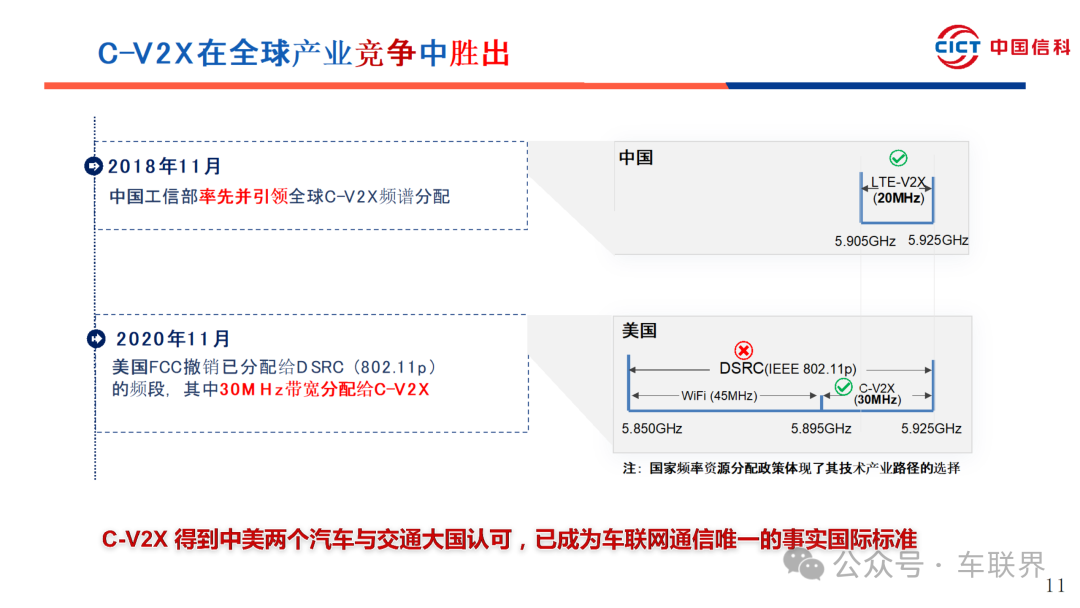
C-V2X在全球产业竞争中胜出。我国工信部在2018年率先给C-V2X分配频率,美国是在2020年撤销了已分配给DSRC的频段,其中30M给了C-V2X。目前C-V2X得到中国、美国两个交通大国的认可,成为全球车联网的唯一标准。
美国在去年明确了要在全国部署C-V2X,花10年时间,到2034年完成C-V2X在全国高速公路的100%覆盖,城市十字路口75%覆盖,并制定了C-V2X上车计划。实际上,美国并没有说为了无人驾驶去发展C-V2X,他们更关注的是解决交通事故问题,实现网联拯救生命。美国有一个统计数据,大概50%的交通事故发生在十字路口,所以不是说未来L5级无人驾驶才需要C-V2X,现在的L2+智能驾驶发展迫切需要C-V2X。

另外,韩国政府去年12月宣布放弃DSRC技术,采用LTE-V2X作为唯一车联网通信技术。

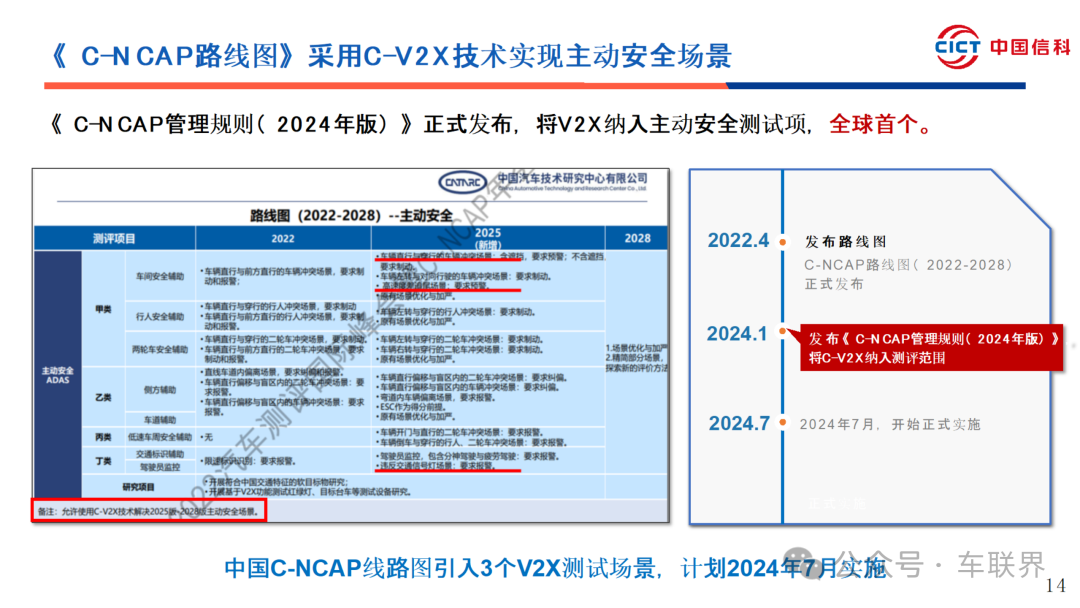
针对C-V2X上车部署,我国C-NCAP(中国新车评价规程)明确将C-V2X纳入主动安全测试,这在全球是首例,并且今年7月份要实施,对全球NCAP体系都有影响,在美国叫US-NCAP、韩国叫K-NCAP、日本叫J-NCAP、欧洲叫E-NCAP,我国率先发布C-V2X主动安全的C-NCAP,就像2018年中国政府率先给C-V2X分配频谱一样,将在全球汽车产业界产生重要影响。
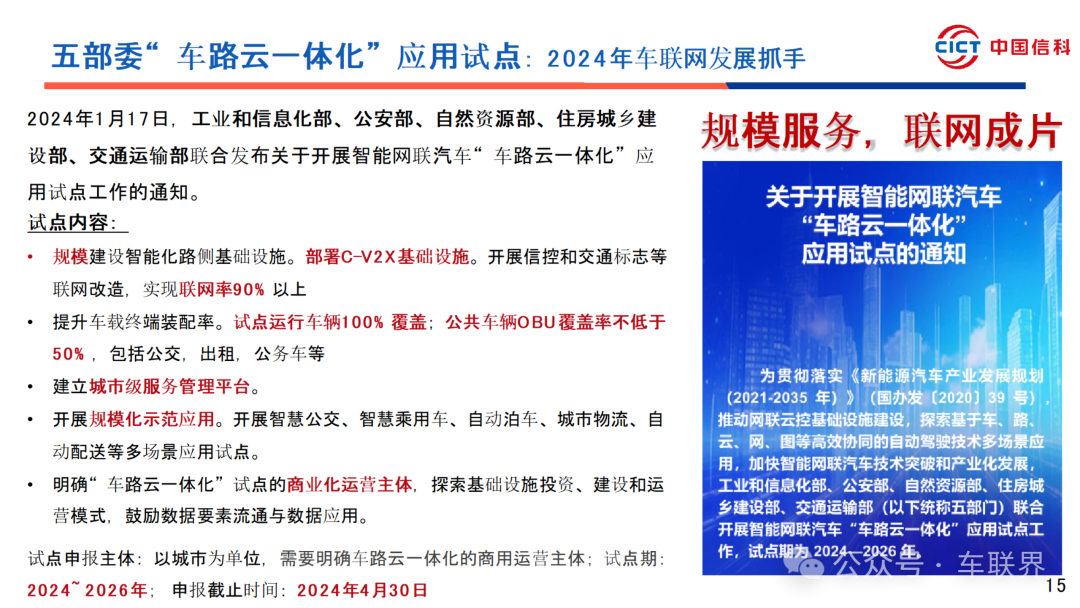
最近五部委在推进智能网联汽车“车路云一体化“应用试点工作,这实际是在解决过去发展中存在的问题,说明产业发展已经到了关键节点。刚才前面专家提到“两率”问题,其实“两率”最早是我提出的,指C-V2X路侧覆盖率、车端渗透率,如果达不到一定规模,老百姓是没有获得感的。为什么此次试点要十字路口C-V2X信控联网率要达到90%以上?绝大多车企都在问,现在的先导区、示范区,前面红绿灯通过C-V2X RSU播报了信控信号,到下一个红绿灯没有,这就很麻烦。在L2+时一旦红绿灯信息参与控车,信号不及时,控车就会点刹,造成用户体验非常差。所以说,C-V2X红绿灯信控信号要实现连续覆盖,与智能网联汽车交互才会有价值。为什么讲C-V2X车端渗透率问题,从2G到3G、3G到4G升级时,运营商发展用户的时候充话费送新手机,后面为什么不送了,因为用户渗透率到了20%后,市场就能自然启动了。所以,我们的车联网和车路云一体化面临的问题在初期市场失效,需要有为政府引导。
这里也讲一下,跨界交流时,业界会有困惑,我在这里澄清一下:
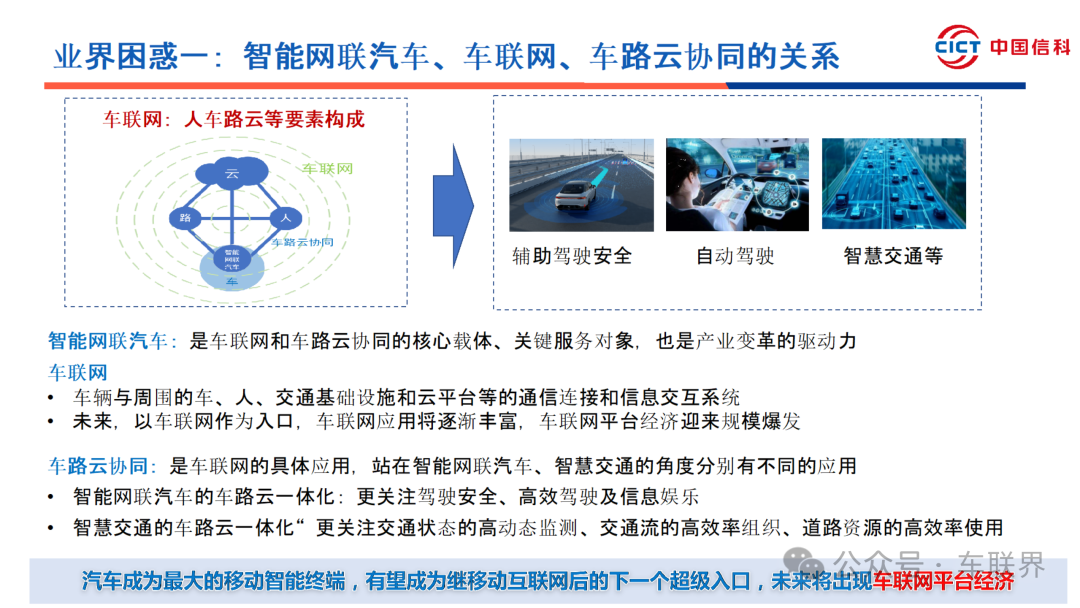
一是智能网联汽车和车联网的关系。智能网联汽车是车联网和车路云协同的核心载体,是最重要的服务对象,也是产业变革的核心驱动力。车联网实际是实现车与路、车与车、车与人、车与云之间的通信连接。车路云其实是车联网的具体应用,与智能网联汽车、智慧交通具体结合时侧重点稍有不同。
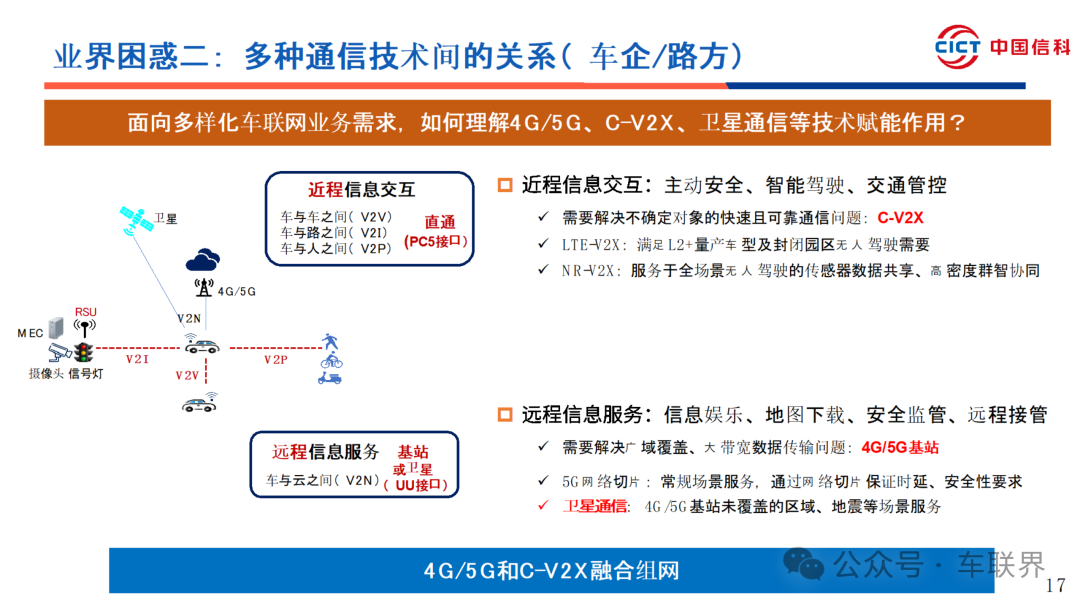
二是多种通信技术间的关系。大家常说的通信技术包括4G/5G、C-V2X车联网、卫星通信等。从服务于智能网联汽车和智慧交通的角度,其实只有两类:近程信息交互和远程信息服务。近程信息交互,就是C-V2X,车与车之间、车与路之间、车与人之间的通信,有低时延、高可靠的严苛要求,主要与智能驾驶有关,实现行驶安全和交通效率。远程信息服务,地图下载、信息娱乐等智能座舱,就是4G/5G基站、卫星通信实现,对实时性要求没有那么强,但要求通信覆盖性好。
大家通常说C-V2X车联网就是服务无人驾驶,其实不完全是。我们今天希望C-V2X能服务有人开车场景,实现安全预警,助力L2+智能驾驶;它同时服务特定场景无人驾驶L4,包括矿山、码头、机场、城市特定区域的RoboTaxi。这两类场景在今天都有规模商用需求。未来,车联网赋能L5全天候全场景无人驾驶实现。

近期卫星通信很热,有人认为卫星通信将取代5G和C-V2X,这是错误的。C-V2X车联网、5G以及卫星通信是互补的,卫星通信最重要的是拓展了V2N功能,可以解决5G基站覆盖不到地方的通信问题,即拓展了远程信息服务,但卫星通信在城镇及建筑物、立交桥遮挡等区域不具有优势。

下面表达几个观点。观点一,单车智能是基础、网联是增强,是赋能。并且我特别强调,单车智能做的越强越好。我跟车企是这么表达的:第一,单车智能能干好的事,网联都不干。第二,单车智能成本高的,C-V2X网联智能能不能降些成本。第三,单车智能解决不了的,网联协助解决。
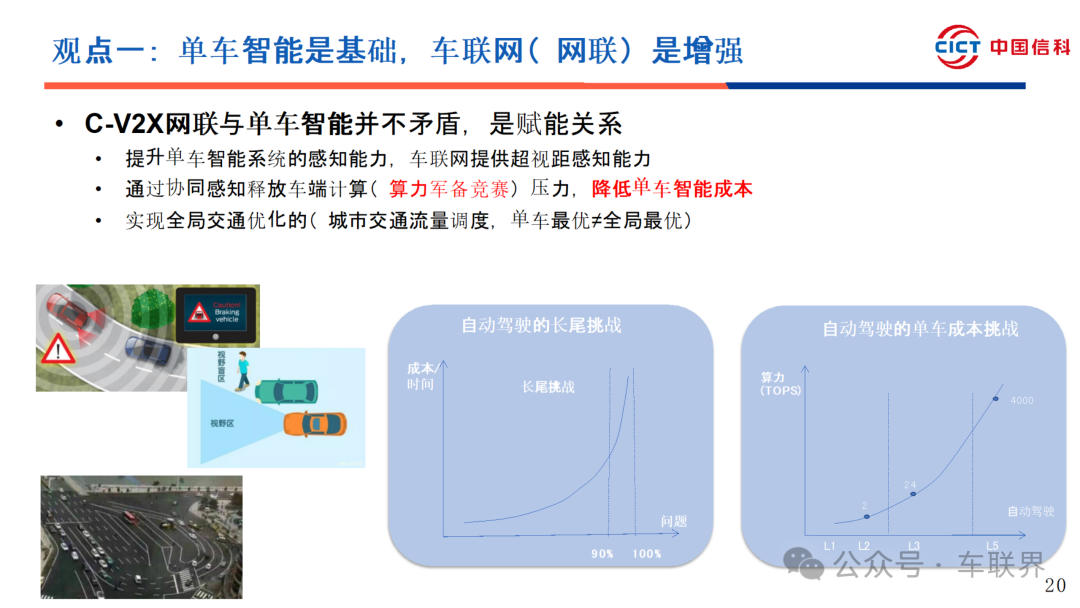
举个例子,单车智能难以识别全天候全场景的红绿灯信号,在强逆光、下暴雪暴雨等场景,仍然存在挑战,为了应对特殊场景(corner case),车企往往要提高算法和算力,加大成本去做。但如果C-V2X RSU直接播报交通信号,那么车辆就能直接获取红绿灯信息,又简单又准时。另外一个例子是交通的全局优化,单车智能实际是个体间的博弈,并没有站在全局优化的角度。比如消防车来了或者有一个救护车来了,很紧急,单车却不能及时做出反应,耽误应急车辆通行,如果有车车通信很快就可以让开了一个车道。
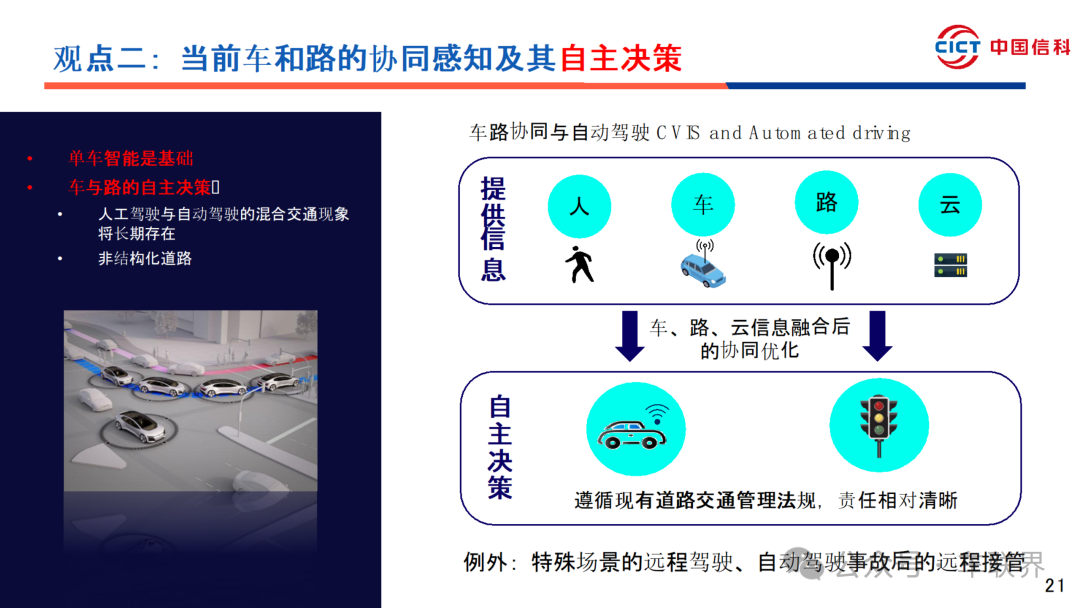
观点二,当前车和路的协同感知是各自的自主决策。有时大家会说路控车了,也有说车直接控交通信号灯了,都不是。因为,人工驾驶与自动驾驶混行交通现象将长期存在,当前车和路虽然都需要智能化,但都是自主决策。路侧提供感知信息给车,车还是在单车智能的基础上自主决策行驶;而交通部门得到车的行驶信息,也自主去决策交通信号的动态调度及潮汐车道。这样遵循现有道路交通管理法规,责任相对清晰的。
观点三,车联网新型基础设施促进车路城融合发展。协同推进智能网联汽车和智慧城市发展过程中,车联网作为新型基础设施达到一定覆盖范围,就可以服务智慧城市,未来边缘计算如果做到了路口全覆盖,就会变成城市算力基础设施的网络,这样面向普通用户提供智能驾驶服务;面向车厂、公交物流提供网联赋能服务;面向政府,赋能交通管理和城市治理服务。

下面有两个建议。建议一:分阶段、分场景推动C-V2X车路协同。当前推进智能辅助驾驶(L2+)行驶安全和交通效率;以及赋能特定场景无人驾驶,包括港口、机场、码头、特定道路Robotaxi。未来,赋能开放道路的全天候全场景无人驾驶。

建议二,以有为政府有形之手和有效市场无形之手前后衔接,推进C-V2X车联网和车路云协同。前期在市场失灵时,通过有为政府加速单城打通,为车企提供连续C-V2X信号灯和复杂路口感知服务。当覆盖率达到一定程度,有效市场便能自然启动;打造全国一张网,破除各地建设及应用标准不统一,确保车联网发展沿着全国一张网、一套应用体系推进。

简单做两个小广告:第一,中国信科是C-V2X车联网原创技术策源地,拥有C-V2X系列核心产品及解决方案,包括C-V2X芯片和前装模组、OBU和RSU等,车联网先导区及智慧高速落地处于行业领先地位,RSU在全国先导区、示范区部署排名第一。

我本人已出了两本中英文书,全球首本C-V2X专著,也得到通信界邬院士,自动驾驶领域的郑院士、汽车界李院士等各位专家的支持,并作序。

最后做一下展望,C-V2X发展车路云协同模式,我国将引领走出智能网联汽车和智能交通的发展模式,基于C-V2X的“聪明的车+智慧的路+协同的云”的车路云协同发展模式,支撑我国汽车产业和交通行业的变革,并将培育智慧路网运营商、出行服务提供商业等新业态、新商业模式,打造数字经济和智慧城市新优势,实现新质生产力,为中国式现代化贡献力量。